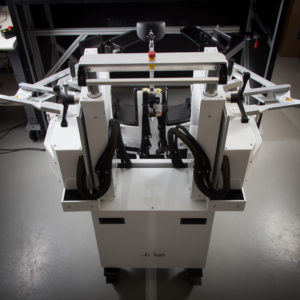
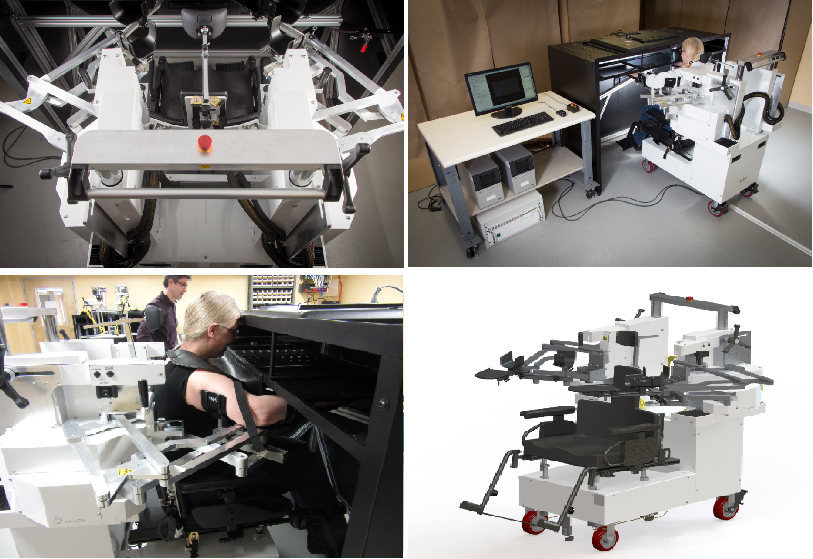
The human KINARM Exoskeleton Lab is a versatile research facility to?
sensory, motor and cognitive function.
2D virtual/augmented reality display
A virtual-reality system permits control over visual stimuli and even of the limb.
-E™ experimental control software and?
hardware
Each Lab supplied by BKIN Technologies includes Dexterit-E™ control and data?
? software, which combines the power of a real-time operating system with the ease of?
? collection, analysis and reporting, without the need for programmers.
(U.S. Patent No. 8,277,396, 8,740,794; CN Patent No. ZL200780047665.6; JP Patent No. 5368311;?
? CA & EP Patent Applications pending).
Custom Task Programs can be created using high-level graphical programming tools.
Integrated Gaze-Tracking (optional)
A head-free gaze-tracker solution that: simplifies experimental set-up, ensuring nothing interferes?
? with the head which is especially important in clinical research; and is easily accommodated in?
? the KINARM Virtual Reality System where space is limited.
KINARM Users benefit from an exponential increase in experimental possibilities, without the?
? headache of having to customize and coordinate multiple hardware solutions.